DELFTACOPTER is a hybrid electric UAV with exceptional efficiency both in hovering and fast forward flight. It is equipped with state of the art on-board stereoscopic wide field of view computer vision.
The design combines the expertise of the MAVLab in the areas of design, propulsion, aerodynamics, control, hybrid UAV, transitioning flight, battery technology, autopilot design and computer vision based navigation.
The hovering efficiency is maximized through the use of a single large rotor. Achieving efficient forward flight required the design of a fully optimized propeller blade design, an efficient RPM controller and a redesigned rotor head. The biplane design resulted from combined structural, aerodynamic and control requirements in both hover and forward flight. The on-board vision is based on the Parrot S.L.A.M.dunk with its NVidia Tegra processing and fish-eye stereo camera system.
The DELFTACOPTER can be operated beyond line of sight, through its Iridium satellite communication link. In fact, through this link it can be operated from any location on earth.
The DELFTACOPTER was designed to participate in the 2016 Outback Medical Challenge, an Australian competition promoting the application of UAV in medical and rescue applications. This year’s edition requires a UAV to pick up and bring back a blood sample of an ill-fated person called “Outback Joe” located at an inaccessible roughly known location 30 kilometer away remote location with unknown terrain.
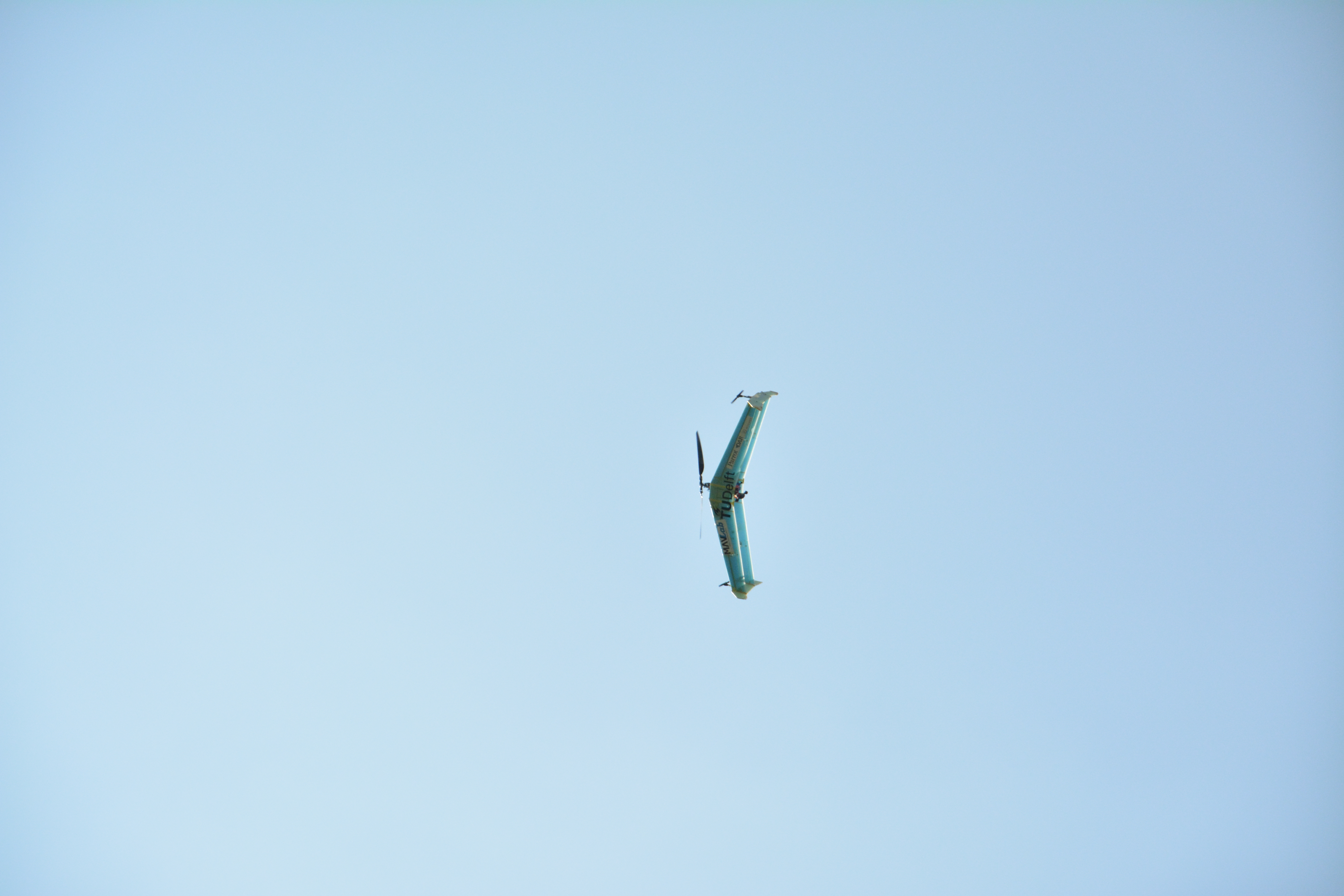
Figure: Efficient fast forward flight

Figure: Efficient hovering thanks to large single propeller.
| Property description | Value |
| Flight | |
| Cruise speed | 45 knots at 300 watt |
| Most efficient speed | 35 knots at 230 watt |
| Maximum speed | 50 knots |
| Physical | |
| Weight | 4kg |
| MTOW | 4,5kg |
| Wing area | 0,496 m2 |
| Wing loading | 8kg/m2 |
| Span | 1,54m |
| Length | 0,6 m |
| Height | 0,4m |
| Energy | |
| Power usage in hover | 280 watt |
| Main battery energy | 10000mAh ~ 225 Wh |
| FTS battery energy | 250mAh ~ 2Wh |
| RPM in forward flight | 450 rpm |
| RPM in hovering flight | 1550 rpm |
| Datalink | |
| Datalink 1 protocol | Iridium satellite communication |
| Datalink 1 range | Global |
| Datalink 2 protocol | 900 MHZ long range communication |
| Datalink 2 range | 40km |
| Weather properties | |
| Maximum wind speed | 30kts |
| Maximum precipitation | Light rain |
15 Replies to “DELFTACOPTER – Outback Medical Express”
Comments are closed.